Laseraltimetrie (LiDAR)
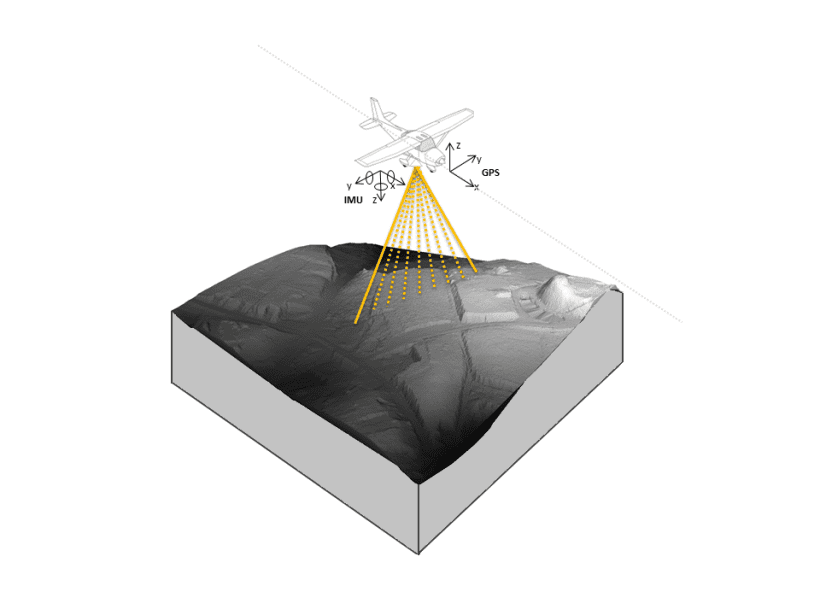
LiDAR is en Engels acroniem voor LIght Detection And Ranging. Het is een remote sensing techniek waarbij de afstand tot objecten wordt gemeten. Een air born lasersysteem meet bijvoorbeeld de hoogte van het aardoppervlak.
De laserscanner werkt in het spectrum van het zichtbaar licht tot nabij infrarood. Er worden continu korte laserpulsen uitgezonden met een welbepaalde golflengte die d.m.v. een roterende spiegel of een ander mechanisme het aardoppervlak in lijnen scant. Met de tijdsbepaling tussen het uitzenden van de puls en het ontvangen van de gereflecteerde puls kan de afstand berekend worden tot het gescande object.
De huidige lasersystemen kunnen per seconde meer dan 100.000 pulsen uitsturen en meerdere reflecties per puls (returns) detecteren. In combinatie met hoogwaardige GPS/INS apparatuur is het mogelijk om de hoogte van het terrein op een bepaalde positie te meten.
Voorbeeld van laseraltimetrie van de kerk van Geraardsbergen:
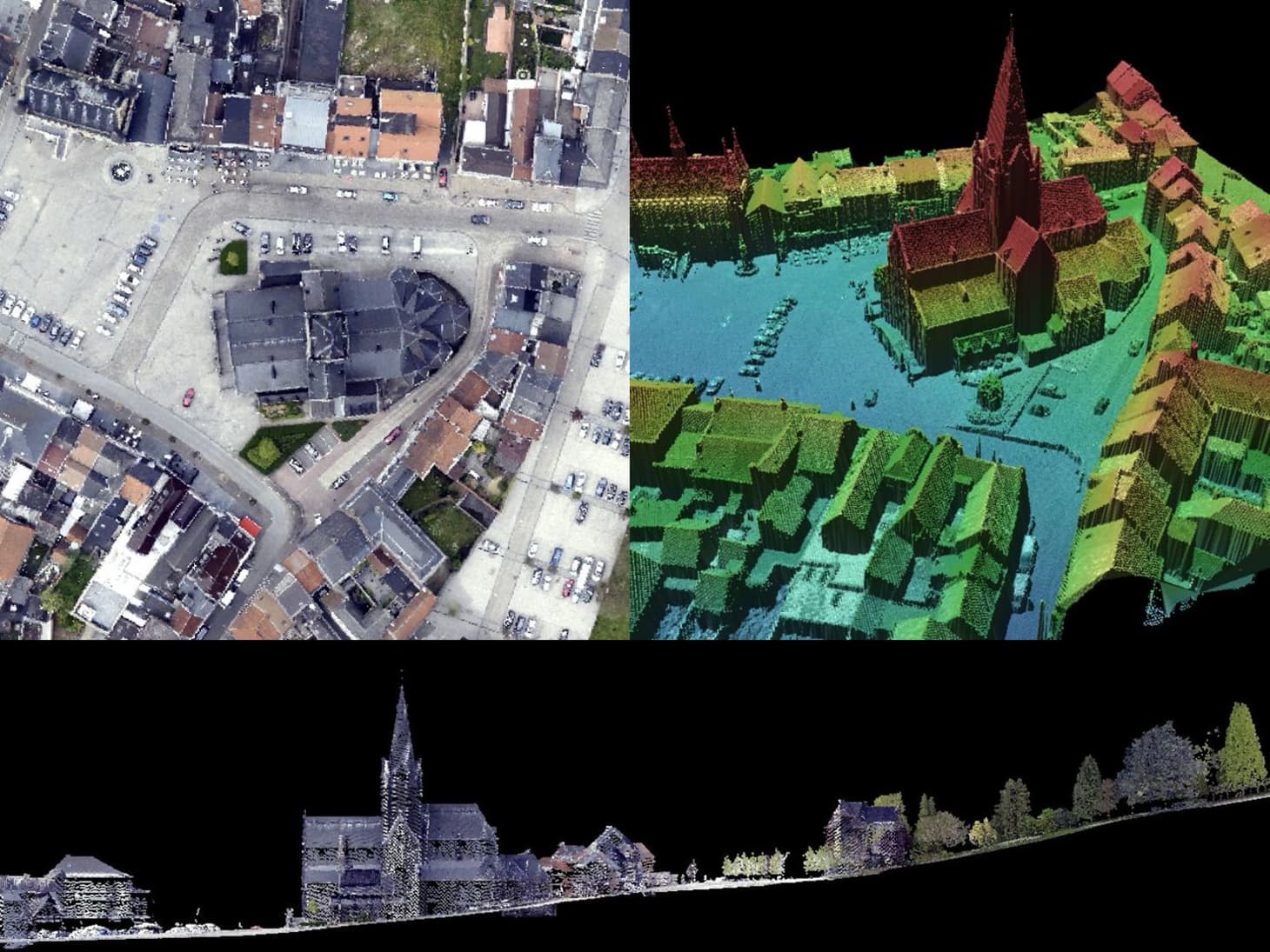
linksboven: de grootschalige luchtfoto; rechtsboven: de 3D puntenwolk (maaiveld en object) met gegevens afkomstig van het DHMV-II Vlaanderen; onderaan: profielbeeld (doorsnede) van het landschap met objecten.
Laserscanning is geen selectieve techniek, dit betekent dat zowel de maaiveldhoogte als de hoogte van alle voorkomende topografische objecten wordt geregistreerd tijdens de inwinning van de data.
Een groot voordeel van de LiDAR techniek is dat meerder reflecties per laserpuls worden gedetecteerd. In het dataverwerkingsproces worden, door middel van classificatie algoritmes, de maaiveldpunten gefilterd van de punten gelegen op objecten (zoals gebouwen en vegetatie) en van de punten op water.
Op basis van de geclassificeerde maaiveldpunten wordt via TIN interpolatie (Triangulair Irregulier Netwerk) een Digitaal Terrein Model geïnterpoleerd. Bij interpolatie van uitsluitend de eerste reflectie van elke puls (“first returns”), ontstaat op dezelfde manier een Digitaal Oppervlakte Model (DSM of Digital Surface Mode).